Inclianaison des faisceaux lumineux et surface éclairée
https://www.geogebra.org/classic/YyRwjmx7
Inclinaison des faisceaux lumineux en fonction de la latitude et de la période de l’année
Inclianaison des faisceaux lumineux et surface éclairée
https://www.geogebra.org/classic/YyRwjmx7
Inclinaison des faisceaux lumineux en fonction de la latitude et de la période de l’année
Pourquoi observe-t-on des températures différentes entre l’équateur et les pôles ?
👉 La cause principale est la variation de la puissance solaire reçue en fonction de la latitude.
Les trois villes étudiées sont :
✅ Conclusion :
Plus la latitude augmente (on se rapproche des pôles), plus la température maximale diminue.
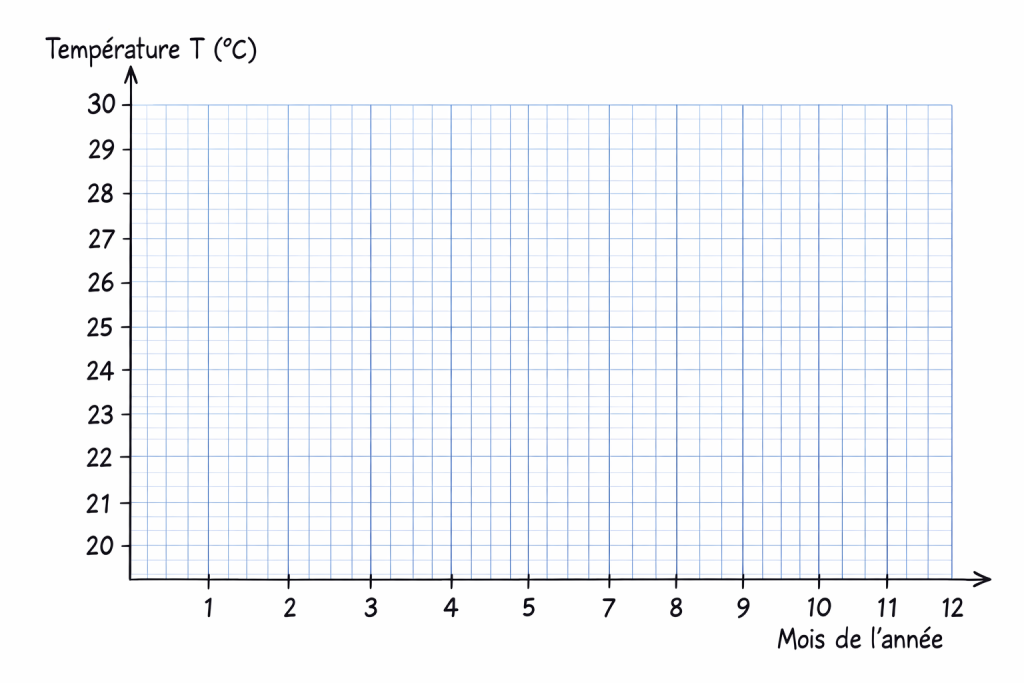
Moyenne calculée à partir du tableau (page 1) :Tˉ≈25°C
Moyenne graphique ≈ 8 °C
Moyenne graphique ≈ –2 °C
✅ Conclusion :
Plus la latitude est élevée, plus la température moyenne annuelle est faible.
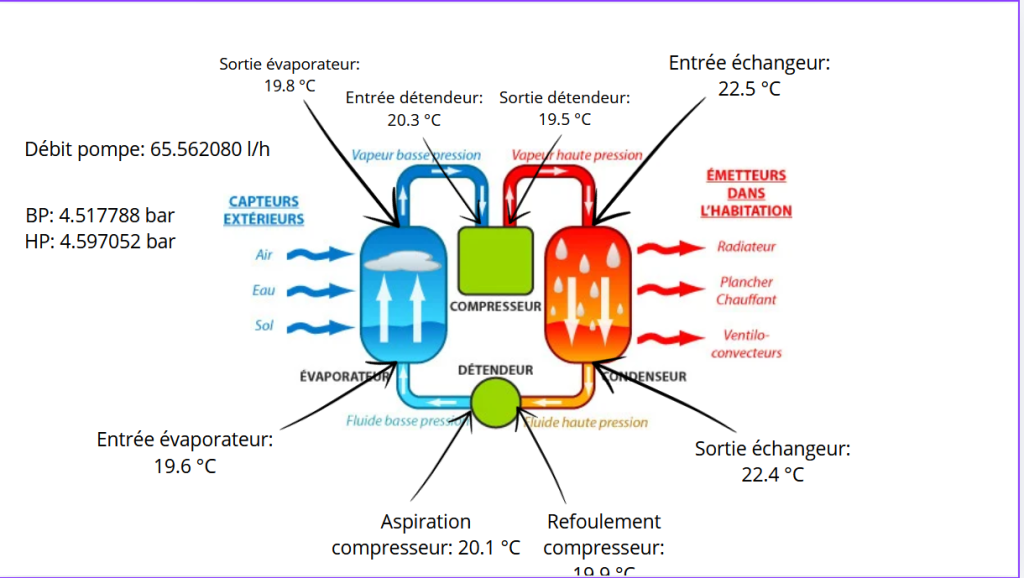
À l’équinoxe de printemps :
Quand les rayons sont inclinés :
La puissance reçue par m² dépend de l’angle d’incidence :PR=PE×cos(α)
avec :
Angles donnés (Doc.3) :
PR=1000×cos(14°)≈970W.m−2
PR=1000×cos(55°)≈570W.m−2
PR=1000×cos(64°)≈440W.m−2
✔ Plus la latitude augmente :
→ Les rayons solaires sont plus inclinés
→ L’énergie est répartie sur une surface plus grande
→ La puissance reçue par m² diminue
→ La température moyenne diminue
Les différences de température entre l’équateur et les pôles s’expliquent principalement par la variation de l’angle d’incidence des rayons solaires avec la latitude, ce qui modifie la puissance solaire reçue par mètre carré.
Objectifs : fractions (\(+\), \(−\), \(×\), \(÷\)), signes, calcul littéral (réduire, distributivité, double distributivité), factoriser.
Nom : ____________________ Date : ____ / ____ / ______ Durée : 1h
Consigne : mettre le facteur commun en évidence.
Consigne : repérer le facteur commun puis factoriser.
Auto-évaluation : Fractions ☐ / Signes ☐ / Développer ☐ / Factoriser ☐
Remarque : _________________________________________________
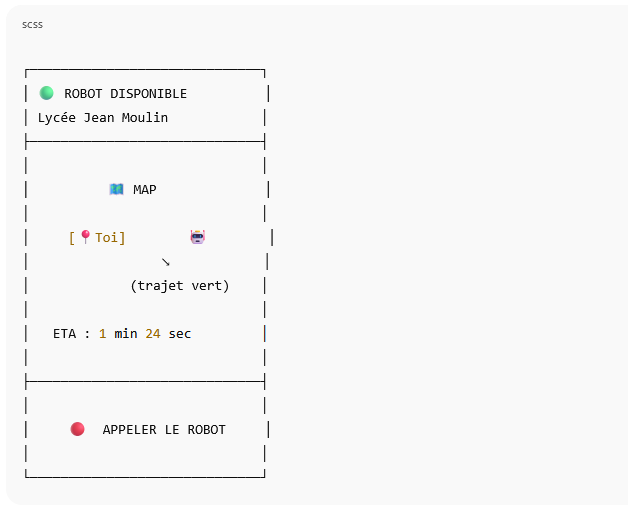
schéma de l’apparence de l’application
Mes tâches
Mes groupes
[bk_gantt project= »3″]
[bk_sticky_board project= »3″]
À partir d’une pièce modélisée sur Onshape, tu vas :
👉 Ce que voit le viewer = ce qui est visible dans Onshape
Dans Onshape :
✅ C’est l’apparence, pas la matière physique
Toujours clic droit sur la pièce :
👉 Sert surtout pour :
Avant d’exporter :
💡 Astuce :
ce que tu vois à l’écran = ce que verra l’utilisateur
| Option | Valeur |
|---|---|
| Format | GLB |
| Units | millimeter (mm) |
| Resolution | Medium ou Fine |
| Export appearances | ✅ activé |
| Export as | Single file |
📁 Tu obtiens un fichier :
👉 piece_3d.glb
.glb✅ La pièce apparaît dans le viewer
Les élèves peuvent régler :
| Fonction f(x) | Ensemble de dérivabilité | f′(x) |
|---|---|---|
| f(x) = k (fonction constante) | ℝ | |
| f(x) = x | ℝ | |
| f(x) = x² | ℝ | |
| f(x) = xⁿ avec n ∈ ℕ* | ℝ | |
| f(x) = 1 / x | ℝ* | |
| f(x) = √x | ]0 ; +∞[ |